robot end effector pdf
The effects might be classified into three categories. Have students think of a job that an end effector could do and design an end effector for the job.

Pdf Development Of Robotic End Effector Using Sensors For Part Recognition And Grasping
Keywords - pruning robot end effector robot I.

. South America Robot End-Effector Market was valued at US 18389 million in 2021 and is projected to reach US 30057 million by 2028 with a CAGR of 73 from 2021 to 2028 segmented into Type Application and Industry. The end-effector for the robot has been actively controlled by two electric motors using mechanical impedance. Purpose robotic end-effectors that can grasp only sacks and bags securely.
The end-effector may be holding a tool or the end-effector itself may be a tool. These are mounted on the end of the 3-dof translational robot arms to form serial robots with translational and rotational capability. Make the End Effector some slack.
The end effector in this case should hold a drill as well as a sensor. The exact nature of this device depends on the application of the robot. Appropriate end effector for.
Robot grippers are. Motion of the robot end-effector. Using 4 the contact force can be rewritten as a function of the this results in a cartesian trajectory for the robot end- robot-environment state q 4 s i and of the input u.
The grapple fixtures are attached to the objects the RMS is trying to grasp. This paper describes a capstone design project in developing an end -effector for robotic arm that is capable of grasping objects of varying sizes. End effector 5 Device that attaches to the wrist of the robot arm and enables the general-purpose robot to perform a specific task.
It is assumed that the sensor can detect the end-effector location and can guide it to the required location. Aside from the robot itself the most critical device in a robotic automation system is the end effector. 2 The following potential disadvantages may affect the selection of the RTIEE for use in tank waste operations.
Smooth the cut edges by scraping them with the picnic knife edge. The gripping device is called an end effector. Manipulator electronic hardware and software.
The center point of end -effector should remain as close as possible to the same location ie. A typical payload-to-weight ratio of a robot arm is about 120. References 6 and 7 describe other architectures with details.
Nest the two cups together and cut through both cups where indicated in the diagram by the dashed line. This activity demonstates how an end effector is constructed to resemble a human hand. Quadcopters were designed to adopt an end effector.
The end-effector must grab and hold a. Specially trained personnel are required to operate the LDUA and the associated end effectors including the RTIEE. The RMSs end effector is a snare device that closes around special posts called grapple fixtures.
The robot uses the end-effector to accomplish a task. A robot gripper is an end-effector or sometimes called end-of-arm tooling that is used on industrial robots for material handling eg grasping holding lifting moving and controlling materials. INTRODUCTION Pruning is a cultivation technology that has great influence on the size flowering and production of fruit trees 1-3.
While for passive force control 16 17 a passively compliant end-effector is used to adjust the robots trajectory based. Powered by four low-power motors to cut with its blade saw. Cut three 12-centimeter lengths of.
END EFFECTORS In robotics an end effector is the device at the end of a robotic arm designed to interact with the environment. Designs for end effectors are as numerous as the applications employing robots. End-effector sensing on the robot structure and its control.
Robot end-effector with promising accuracy and precision. This is why each manufacturing robot needs an end effector. However a robot arm alone can hardly accomplish any job.
Overload Protection When some unexpected event happens to the end effector such as a part becoming stuck in a die or a tool caught in a moving conveyor. It also provides a mu ch faster respo nse tha n typical vision cameras and can b e sampled at a much highe r sampling rate. Have the robotics engineers work in pairs or small groups.
In robotics an end effector is the device at the end of a robotic arm designed to interact with the environment. The design of the robotic end-effectors used to grab sacks and bags was one of the primary foci of this research work and is described in this article. Effectors and vision systems.
Note I write primary above because the 3 translational joints also cause rotations and also the 3 wrist joints can cause translations of the tool. In the strictest definition which originates from serial robotic manipulators the end effector is the. End effectors can be part of the robots integral design or added-on to the base robot.
There are two specifications associated with the end-effector. The design parameters are as follows. By definition an end effector is the device at the end of a robotic arm that allows it to interact with its environment.
The exact nature of this device depends on the application of the robot. That means it is located at the end of the arm and it has an effect such as grasping on objects within its reach. The task was to design an end effector.
In this eBook you will find information on the different end effectors available on the market. Whatever the cause the consequences involve possible damage to the end effector or maybe even the robot itself. The end effector means the last link or end of.
Grippers to grasp and manipulate objects eg parts during work cycle Tools to perform a. Basic grasping end effector forms are referred to as grippers. An end effector is a kind of tool holder which is placed at the end of a robot.
10182015 C 2001 Ernest L. End effectors are. The Robotic Tank Inspection End Effector.
Experiment shows that this end effector can perform the task of cutting and smashing branches within 1 cm. Basic Principle Figures 2A 2B and 2C depict the basic architecture of the grasping mechanism of the end-effector that is used to. A straight -line path over the range of gripper motion.
Europe Robot End-Effector Market was valued at US 87469 million in 2021 and is projected to reach US 253311 million by 2028 with a CAGR of 164 from 2021 to 2028 segmented into Type Application and Industry. The end-effectors described here cannot grasp boxes or any other objects. The drill that would be used in this project was a Desoutter CFD 1155398 which is a manual drill meant to be held by hand and not by a robot.
Be able to compute the load. ROBOTEND EFFECTOR INTERFACE Physical support during the work cycle 3. Also forces needed to correctly execute the task can be specified through a trajectory Xdt and 17.
Pull the end of the strings 1. Robot grippers are very important tools because without it industrial robot cannot be used in material handling application. Hall University of Cincinnati 5.
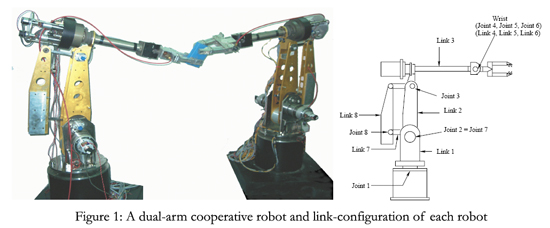
A Dual Arm Cooperative Robot
Machines Free Full Text A Review Of End Effector Research Based On Compliance Control Html

Robot End Effector Wikiwand
Robot End Effector Market Type Robot Type Application 2021 2030

Integrated Robotics Keba Comau Pdf Catalogs Technical Documentation Brochure

Pdf Comparison Of Exoskeleton Robots And End Effector Robots On Training Methods And Gait Biomechanics Semantic Scholar

Pdf A Double Claw Robotic End Effector Design Semantic Scholar

Pdf A Double Claw Robotic End Effector Design Semantic Scholar

Robot End Effector Definition And Examples

Pdf A Double Claw Robotic End Effector Design Semantic Scholar
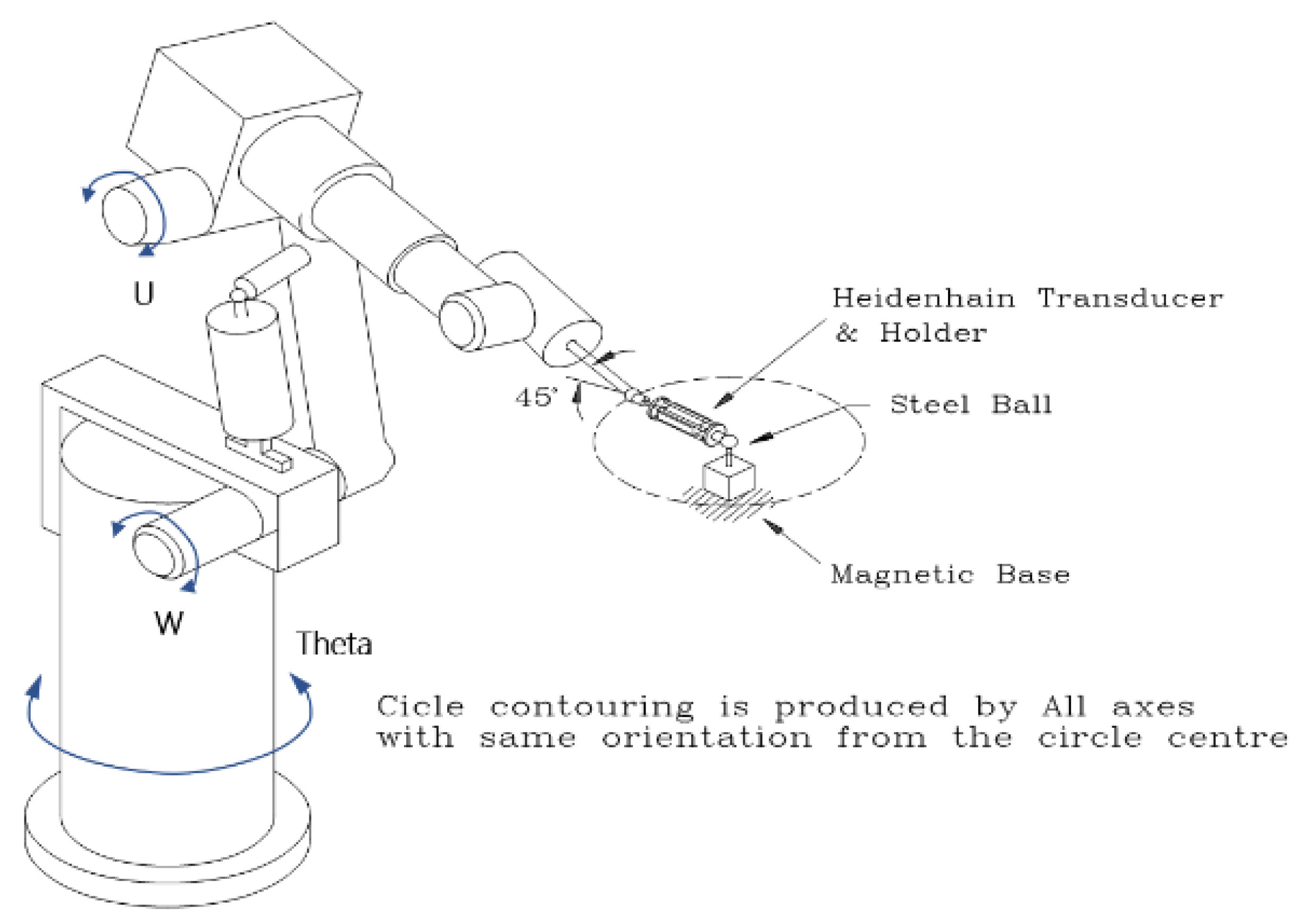
Applied Sciences Free Full Text Study Of Orientation Error On Robot End Effector And Volumetric Error Of Articulated Robot Html

Pdf Robotics 1 Lecture 7 End Effectors

Pdf Robotics 1 Lecture 7 End Effectors

A Reconfigurable Robotic End Effector For Machining And Part Handling Machine Tool Simulation Semantic Scholar

Pdf Development Of Robotic End Effector Using Sensors For Part Recognition And Grasping

Pdf Manual Serial Arm Thanh An Truong Academia Edu
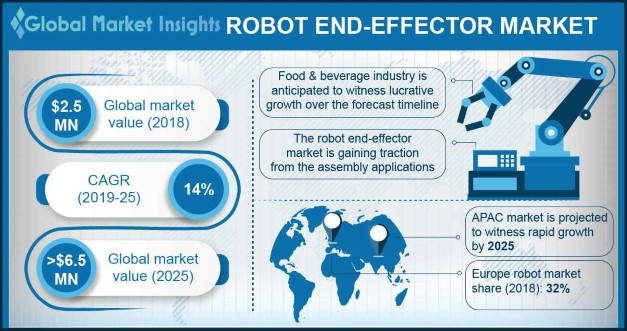
Robot End Effector Market Share Global Industry Report 2019 2025
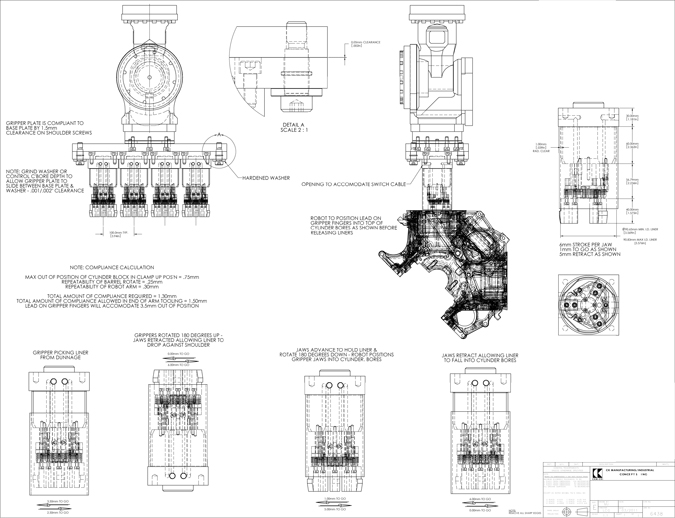
Ck Manufacturing Industrial Manufacturing Military Manufacturing Industrial Design Gantry Robot End Effectors Pick And Place Elevators Buffer Storage Automation Elevators Tip Ups Barrel Type Rotates End Effectors

Robot Arm 4 Bar Linkage End Effector Robot Gripper 11037 Robotpark Academy Robot Gripper Robot Arm Robot Design